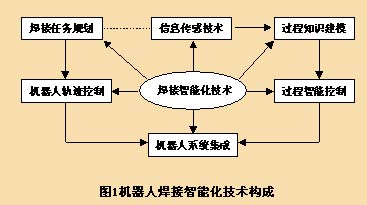
1 Introduction With the development of advanced manufacturing technology, it has become an inevitable trend to realize the automation, flexibility and intelligence of welding product manufacturing [1-8]. At present, the use of robotic welding has become a major symbol of the modernization of welding automation technology. Due to its versatility and reliable work, welding robots have received more and more attention. The use of robot technology in welding production can improve productivity, improve working conditions, stabilize and ensure welding quality, and achieve welding automation of small batch products [9]. From the birth and development of the 1960s to the present, the research of welding robots has gone through three stages, namely, the teaching reproduction stage, the offline programming stage and the autonomous programming stage. With the continuous advancement of computer control technology, the welding robot is developed from a single single-machine teaching reproduction type to a multi-sensing and intelligent flexible processing unit (system), and the transition from the second generation to the third generation will become The goal pursued by welding robots [9, 10]. At present, a large number of arc welding robot systems at home and abroad are basically the first-generation or second-generation welding. Since the welding path and welding parameters are preset according to the actual working conditions, there is a lack of external information sensing during welding. Real-time adjustment control function, such arc welding robots have strict requirements on the stability of welding working conditions, lack of "flexibility" in welding, and show obvious shortcomings. In the actual arc welding process, the welding conditions are constantly changing. For example, the errors in processing and assembly will cause changes in the position and size of the weld. During the welding process, the heat and heat dissipation conditions of the workpiece will change and the weld bead will be deformed and unevenly penetrated. [9,12]. In order to overcome the influence of various uncertain factors on the welding quality in the robot welding process and improve the intelligent level and reliability of the robot operation, the arc welding robot system is required to realize not only the automatic real-time tracking of the space weld, but also Online adjustment of welding parameters and real-time control of weld quality. 2. The main components of robotic welding intelligent technology Modern welding technology has a typical multi-disciplinary cross-fusion feature [5,11], and the use of robotic welding is a concentrated expression of the technical achievements of related disciplines. The main technical components involved in introducing intelligent technology into welding robots are shown in Figure 1. These include: 1) Self-planning technology for welding robots for welding tasks; 2) Motion track control technology of the welding robot; 3) Information sensing, modeling and intelligent control technology for welding dynamic processes; 4) The integration and control of the robot welding system, the software and hardware integration design, unified optimization scheduling and control of the above-mentioned welding task planning, trajectory tracking control, sensing system, process model, intelligent control and other subsystems, involving the welding flexible manufacturing system Material flow, information flow management and control, multi-robot and sensor, controller multi-intelligent unit and complex system control. The following is a brief description of the main technical research and development status of the above related aspects. 3. Robotic welding task independent planning technology [13-16] As mentioned above, the arc welding robots at home and abroad are mostly teaching-reproduction type, which cannot meet the increasingly complex needs of welding production, and there are still many problems to be studied. The research on arc welding robot gradually transitions to autonomous, and the off-line programming technology of arc welding robot appears. A relatively complete arc welding robot offline programming system should include welding job task description (language programming or graphic simulation), operation manual path. Planning, kinematics and dynamics algorithms and optimization, joint-level planning for welding tasks, animation of planning results, offline correction of planning results, downloading with robots, self-planning of paths with sensors, and online path correction A few major components. Key technologies typically include the design of vision sensors and the acquisition of weld information, and the design of planning controllers. At the 1987 International Conference on Automation and Robot Welding, experts summarized the development of off-line programming, the most representative of which was the WRAPS system. KHGoh et al. established an adaptive offline programming and control system for welding robots based on expert systems on a welding station FANUC/WESTWOOD, which includes welding database, offline programming, computer simulation and welding expert system. It is also equipped with a vision sensor for pre-weld joint inspection and post-weld defect inspection to form a complete expert welding robot system. Researchers at Harbin Institute of Technology in China have studied the non-collision path planning of welding robots, the independent planning of redundant arc welding robots and the joint planning of welding process parameters [14-16], and designed and developed the offline planning and simulation system module structure. 2 is shown. The arc welding robot planning system includes CAD input system, welding expert system, independent planning system and simulation system. In a broader sense, a more complete arc welding robot planning system should also include a feedback control system, a pre-weld sensing system, and a post-weld inspection system. 4. Weld seam tracking and guiding technology for robot welding In terms of robot welding operations, the motion trajectory control of the welding robot mainly refers to the initial welding position guiding and the welding seam tracking control technology. In various applications of arc welding robots, adaptability is the most important factor affecting welding quality and welding efficiency. The adaptability of the arc welding robot is to control and correct the operation of the robot in real time using the input signal of the sensor detected from the welded workpiece to adapt to the changing welding conditions and environment. Swedish and American companies have developed laser scanning and structured light vision sensors for weld seam tracking systems. Dr. Lu Weixin and Dr. Zhang Wei from Harbin Institute of Technology in China have developed a vision system based on laser scanning and high-performance linear array CCD sensors, as shown in Figure 4, to achieve real-time visual control [13]. In the research of the initial welding robot vision guidance technology, Dr. Lu Weixin designed a local search algorithm based on the laser scanning vision system to achieve autonomous guidance of certain workpiece weld characteristics in a certain range [13]. Guo Zhenmin and Li Jinquan respectively used the visual servo and image recognition technology to explore the initial welding position guidance and weld identification and real-time tracking of robot welding. Next page Mosquito Patch,Mosquito Sticker,Mosquito Paster Fenghua Jade Motor Co., Ltd. , http://www.aerosolmp.com